目錄
- 引言
- 基本介紹
- 1.1 環(huán)境要求
- 1.2 算法設(shè)計
- 行人檢測
- 2.1 YOLO行人檢測
- 2.2 Deepsort行人跟蹤
引言
行人檢測是近年來計算機視覺領(lǐng)域的研究熱點�����,同時也是目標檢測領(lǐng)域中的難點��。其目的是識別和定位圖像中存在的行人���,在許多領(lǐng)域中都有廣泛的應用��。交通安全方面�����,無人駕駛汽車通過提前檢測到行人及時避讓來避免交通事故的發(fā)生����;安防保護方面����,通過行人檢測來防止可疑人員進入;公共場所管理方面����,通過行人檢測統(tǒng)計人流量數(shù)據(jù)����,優(yōu)化人力物力等資源的分配�����。
對于目標檢測的方法���,從2013年Ross Girshick提出R-CNN開始,人們在短短幾年內(nèi)相繼提出Fast R-CNN����、Faster R-CNN、Mask R-CNN����、SSD、YOLO等算法���,其中兩步檢測的目標檢測方法(R-CNN系列算法)需要先產(chǎn)生大量候選框之后再用卷積神經(jīng)網(wǎng)絡(luò)對候選框進行分類和回歸處理����;單步檢測的方法(SSD���、YOLO系列算法)則直接在卷積神經(jīng)網(wǎng)絡(luò)中使用回歸的方法一步就預測出目標的位置以及目標的類別�����。雖然兩步檢測的目標檢測方法在大多數(shù)的場景下精確率更高����,但是它需要分兩個步驟進行,因此�����,這種方法將耗費大量的時間成本和昂貴的硬件成本����,不適合對視頻文件進行實時的檢測。而YOLO系列的網(wǎng)絡(luò)速度更快�,可以適應實時視頻的檢測,泛化能力更強�。
對于人員跟蹤,2016年Alex Bewley提出了簡單在線實時跟蹤算法����,這種算法把傳統(tǒng)的卡爾曼濾波和匈牙利算法結(jié)合到一起, 能在視頻幀序列中很好地進行跨檢測結(jié)果的關(guān)聯(lián)����, 而且它的速度比傳統(tǒng)的算法快20倍左右�����,可以快速地對目標檢測反饋的數(shù)據(jù)進行處理�����。
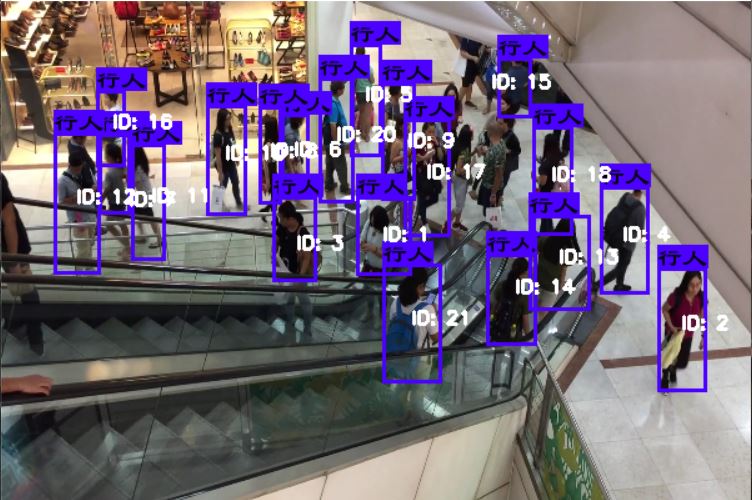
故本項目通過采用深度學習方法實現(xiàn)YOLO算法行人檢測和deepsort算法對人員定位的和軌跡跟蹤����。其最終實現(xiàn)效果如下圖可見:

基本介紹
1.1 環(huán)境要求
本次環(huán)境使用的是python3.6.5+windows平臺�����。主要用的庫有:
opencv模塊�����。在計算機視覺項目的開發(fā)中��,opencv作為較大眾的開源庫�����,擁有了豐富的常用圖像處理函數(shù)庫����,采用C/C++語言編寫,可以運行在Linux/Windows/Mac等操作系統(tǒng)上��,能夠快速的實現(xiàn)一些圖像處理和識別的任務��。
pillow模塊����。PIL是理想的圖像存檔和批處理應用程序。您可以使用庫創(chuàng)建縮略圖�,在文件格式、打印圖像等之間進行轉(zhuǎn)換����。它提供了廣泛的文件格式支持、高效的內(nèi)部表示和相當強大的圖像處理功能����。核心圖像庫是為快速訪問以幾種基本像素格式存儲的數(shù)據(jù)而設(shè)計的。為通用圖像處理工具提供了堅實的基礎(chǔ)��。
Scipy庫�����。Scipy是一個用于數(shù)學、科學����、工程領(lǐng)域的常用軟件包,可以處理插值����、積分、優(yōu)化����、圖像處理、常微分方程數(shù)值解的求解����、信號處理等問題�。它用于有效計算Numpy矩陣���,使Numpy和Scipy協(xié)同工作,高效解決問題�。
keras模塊�����。Keras是一個由Python編寫的開源人工神經(jīng)網(wǎng)絡(luò)庫�,可以作為Tensorflow�����、Microsoft-CNTK和Theano的高階應用程序接口,進行深度學習模型的設(shè)計�����、調(diào)試、評估�����、應用和可視化 。
1.2 算法設(shè)計
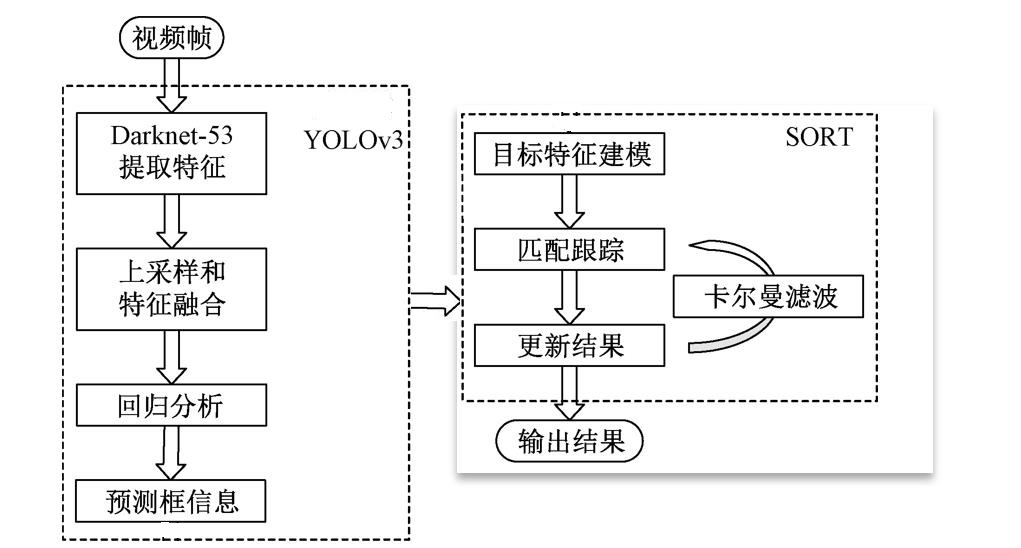
使用卷積神經(jīng)網(wǎng)絡(luò)對視頻中的行人進行檢測和跟蹤��。視頻幀輸入之后首先進入YOLOv3目標檢測的網(wǎng)絡(luò)�,經(jīng)過Darknet-53提取特征�;其次��,進行上采樣和特征融合,再進行回歸分析����;再次����,把得出的預測框信息輸入SORT算法進行目標特征建模��,匹配和跟蹤;最后��,輸出結(jié)果����。下圖為算法流程設(shè)計圖:

行人檢測
2.1 YOLO行人檢測
常見的兩階段檢測首先是使用候選區(qū)域生成器生成的候選區(qū)集合����,并從每個候選區(qū)中提取特征���,然后使用區(qū)域分類器預測候選區(qū)域的類別����。而YOLO作為單階段檢測器,則不用生成候選區(qū)域��,直接對特征圖的每個位置上的對象進行分類預測��,效率更高�����。
在這里使用labelme標注行人數(shù)據(jù)集,然后通過搭建好的YOLO算法產(chǎn)生模型并進行訓練即可���。
def yolo_body(inputs, num_anchors, num_classes):
"""Create YOLO_V3 model CNN body in Keras."""
darknet = Model(inputs, darknet_body(inputs))
x, y1 = make_last_layers(darknet.output, 512, num_anchors*(num_classes+5))
x = compose(
DarknetConv2D_BN_Leaky(256, (1,1)),
UpSampling2D(2))(x)
x = Concatenate()([x,darknet.layers[152].output])
x, y2 = make_last_layers(x, 256, num_anchors*(num_classes+5))
x = compose(
DarknetConv2D_BN_Leaky(128, (1,1)),
UpSampling2D(2))(x)
x = Concatenate()([x,darknet.layers[92].output])
x, y3 = make_last_layers(x, 128, num_anchors*(num_classes+5))
return Model(inputs, [y1,y2,y3])
2.2 Deepsort行人跟蹤
行人多目標跟蹤算法設(shè)計的步驟如下:
(1) 檢測階段:目標檢測算法會分析每一個輸入幀�����,并識別屬于特定類別的對象�����,給出分類和坐標����。
(2) 特征提取/運動軌跡預測階段:采用一種或者多種特征提取算法用來提取表觀特征���,運動或者交互特征。此外��,還可以使用軌跡預測器預測該目標的下一個位置�。
(3) 相似度計算階段:表觀特征和運動特征可以用來計算兩個目標之間的相似性�。
(4) 關(guān)聯(lián)階段:使用計算得到的相似性作為依據(jù),將屬于同一目標的檢測對象和軌跡關(guān)聯(lián)起來����,并給檢測對象分配和軌跡相同的 ID。
使用卡爾曼濾波類跟蹤的估計狀態(tài)系統(tǒng)和估計的方差或不確定性���。用于預測�����。
這里dist_thresh為距離閾值��。當超過閾值時���,軌道將被刪除�,并創(chuàng)建新的軌道���;Max_frames_to_skip為允許跳過的最大幀數(shù)對于跟蹤對象未被檢測到�;max_trace_length為跟蹤路徑歷史長度;trackIdCount為每個軌道對象的標識����。
def Update(self, detections):
if (len(self.tracks) == 0):
for i in range(len(detections)):
track = Track(detections[i], self.trackIdCount)
self.trackIdCount += 1
self.tracks.append(track)
N = len(self.tracks)
M = len(detections)
cost = np.zeros(shape=(N, M))
for i in range(len(self.tracks)):
for j in range(len(detections)):
try:
diff = self.tracks[i].prediction - detections[j]
distance = np.sqrt(diff[0][0]*diff[0][0] +
diff[1][0]*diff[1][0])
cost[i][j] = distance
except:
pass
cost = (0.5) * cost
assignment = []
for _ in range(N):
assignment.append(-1)
row_ind, col_ind = linear_sum_assignment(cost)
for i in range(len(row_ind)):
assignment[row_ind[i]] = col_ind[i]
un_assigned_tracks = []
for i in range(len(assignment)):
if (assignment[i] != -1):
if (cost[i][assignment[i]] > self.dist_thresh):
assignment[i] = -1
un_assigned_tracks.append(i)
pass
else:
self.tracks[i].skipped_frames += 1
del_tracks = []
綜合結(jié)果顯示
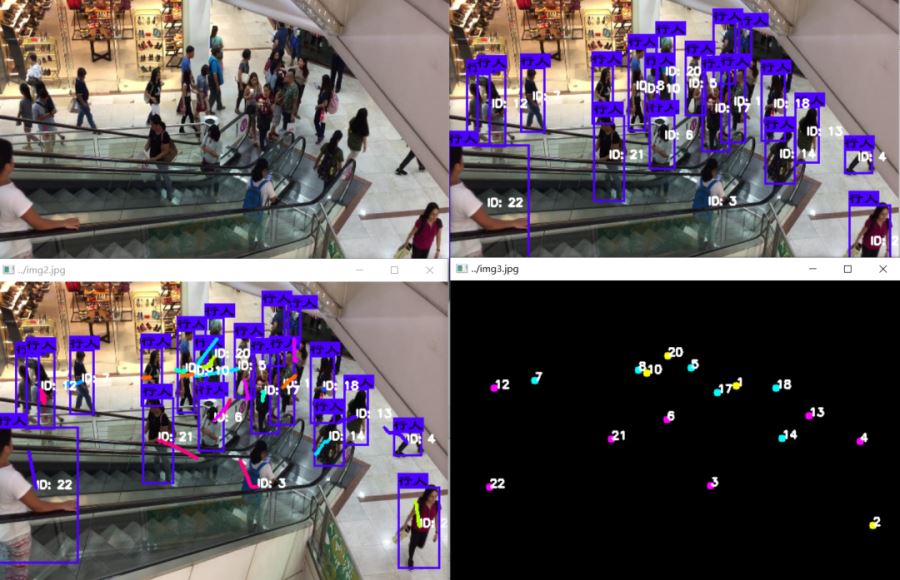
將YOLO行人檢測和deepsort算法結(jié)合���,并通過設(shè)置基本閾值參數(shù)控制軌跡預測的歐式距離。通過搭建本項目可應用于城市商業(yè)街道��、人行道�、校園道路場景��,使用其得出的人員流動數(shù)據(jù),幫助公共交通和安全管理�����。最終得到的使用效果如下:
track_colors = get_colors_for_classes(max_colors)
result = np.asarray(image)
font = cv2.FONT_HERSHEY_SIMPLEX
result0 = result.copy()
result1=result.copy()
img_position=np.zeros([result.shape[0],result.shape[1],3])
if (len(centers) > 0):
tracker.Update(centers)
for i in range(len(tracker.tracks)):
if (len(tracker.tracks[i].trace) > 1):
x0, y0 = tracker.tracks[i].trace[-1][0][0], tracker.tracks[i].trace[-1][1][0]
cv2.putText(result0, "ID: "+str(tracker.tracks[i].track_id-99), (int(x0), int(y0)), font, track_id_size,
(255, 255, 255), 2)
cv2.putText(result1, "ID: " + str(tracker.tracks[i].track_id - 99), (int(x0), int(y0)), font,
track_id_size,
(255, 255, 255), 2)
color_random = tracker.tracks[i].track_id % 9
cv2.circle(img_position, (int(x0), int(y0)), 1, track_colors[color_random], 8)
cv2.putText(img_position, str(tracker.tracks[i].track_id - 99), (int(x0), int(y0)), font,
track_id_size,
(255, 255, 255), 2)
result0=result0.copy()
for j in range(len(tracker.tracks[i].trace) - 1):
x1 = tracker.tracks[i].trace[j][0][0]
y1 = tracker.tracks[i].trace[j][1][0]
x2 = tracker.tracks[i].trace[j + 1][0][0]
y2 = tracker.tracks[i].trace[j + 1][1][0]
clr = tracker.tracks[i].track_id % 9
distance = ((x2 - x1) ** 2 + (y2 - y1) ** 2) ** 0.5
if distance max_point_distance:
cv2.line(result1, (int(x1), int(y1)), (int(x2), int(y2)),
track_colors[clr], 4)
result1=result1.copy()
完整代碼:
鏈接: https://pan.baidu.com/s/1cJ6dgcEHOVGXvfg-ON3IrQ
提取碼: f5y9
到此這篇關(guān)于Deepsort + Yolo 實現(xiàn)行人檢測和軌跡追蹤的文章就介紹到這了,更多相關(guān)Deepsort Yolo 行人檢測內(nèi)容請搜索腳本之家以前的文章或繼續(xù)瀏覽下面的相關(guān)文章希望大家以后多多支持腳本之家!
您可能感興趣的文章:- python+opencv3.4.0 實現(xiàn)HOG+SVM行人檢測的示例代碼
