import numpy as np
import cv2 as cv
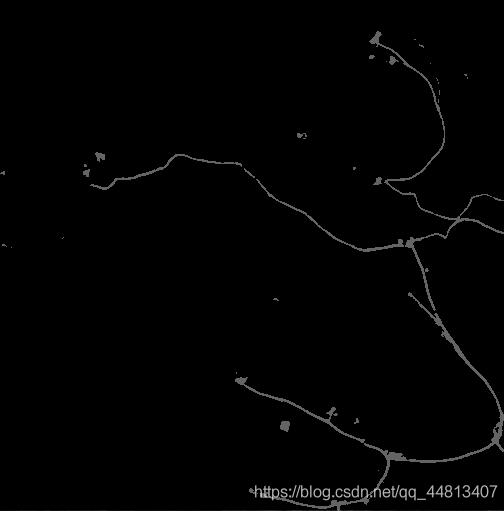
def ROA(image_path, save_path, threshold):
img = cv.imread(image_path)
image = cv.cvtColor(img, cv.COLOR_RGB2GRAY)
new = np.zeros((512, 512), dtype=np.float64) # 開辟存儲空間
width = img.shape[0]
heigh = img.shape[1]
for i in range(width):
for j in range(heigh):
if i == 0 or j == 0 or i == width - 1 or j == heigh - 1:
new[i, j] = image[i, j]
continue
print(image[i, j])
if image[i, j] 60:
continue
num_sum = 0.0
u1 = (image[i - 1, j - 1] + image[i, j - 1] + image[i + 1, j - 1]) / 3
u2 = (image[i - 1, j + 1] + image[i, j + 1] + image[i + 1, j + 1]) / 3
r12 = 1.0
if float(u2) - 0.0 > 1e6:
r12 = float(u1) / float(u2)
if float(u1) - 0.0 > 1e6:
r12 = float(u2) / float(u1)
num_sum += r12
u1 = (image[i - 1, j - 1] + image[i, j - 1] + image[i - 1, j]) / 3
u2 = (image[i + 1, j] + image[i + 1, j + 1] + image[i, j + 1]) / 3
r12 = 1.0
if float(u2) - 0.0 > 1e6:
r12 = float(u1) / float(u2)
if float(u1) - 0.0 > 1e6:
r12 = float(u2) / float(u1)
num_sum += r12
u1 = (image[i - 1, j - 1] + image[i - 1, j] + image[i - 1, j + 1]) / 3
u2 = (image[i + 1, j - 1] + image[i + 1, j] + image[i + 1, j + 1]) / 3
r12 = 1.0
if float(u2) - 0.0 > 1e6:
r12 = float(u1) / float(u2)
if float(u1) - 0.0 > 1e6:
r12 = float(u2) / float(u1)
num_sum += r12
u1 = (image[i - 1, j] + image[i - 1, j + 1] + image[i, j + 1]) / 3
u2 = (image[i, j - 1] + image[i + 1, j - 1] + image[i + 1, j]) / 3
r12 = 1.0
if float(u2) - 0.0 > 1e6:
r12 = float(u1) / float(u2)
if float(u1) - 0.0 > 1e6:
r12 = float(u2) / float(u1)
num_sum += r12
new[i, j] = num_sum / 4.0
if new[i, j] > threshold:
new[i, j] = 100
print(new[i, j])
print(new)
cv.imwrite(save_path, new)
if __name__ == "__main__":
image_path = r""
save_path = r""
threshold =
ROA(image_path, save_path, threshold)